Year 9 ~ Thinking about projects ....
~ CAMS ~ Making things move ‘up and down’
or from ‘side to side’.
or from ‘side to side’.
Look around at the links, levers, cams, pulleys and gears that are used in everyday situations and try to think of new ideas for mechanical toys. Look at the web-sites that show ‘automata’ and analyse why these toys work as they do.

Start by looking at the three ‘orders’ of levers. The first class ~ Number 1 is a simple see-saw or scissors. Notice how the effort needed to move the load is reversed in the direction it acts on the load. Look at the other two classes and see if the same happens with those. Class 2 is seen in the example of the wheelbarrow and the class 3 lever is seen in things such as tweezers and fishing rods. This last class is an inefficient system as the load is further from the fulcrum than the effort.

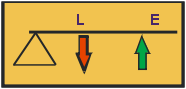

Class 1 Class 2 Class 3

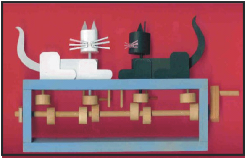
The two illustrations shown here demonstrate how two dimensional movement can be produced from either a simple circular cam that has an offset central
axle, or from a more complex pear shaped cam (See the ‘cats’ model above). Still more complex movements can be produced from a wavy line cut into a cylinder (see the dog’s head shown above) or from a specially shaped cam.
With odd shaped CAMS a prototype should be
made from card and the output movement
gradually improved until the required
result is achieved. They can be linked with
levers to give more
effects as in the
animation above.
With odd shaped CAMS a prototype should be
made from card and the output movement
gradually improved until the required
result is achieved. They can be linked with
levers to give more
effects as in the
animation above.
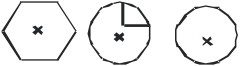
Must revolve one way only
~ GEARS ~ Can be used for Changing the speed of things ~
.... or for Reversing the direction of motion - or changing the plane of movement ( i.e move the plane through 90
The most important feature of understanding gears in KS3 and KS4 projects is to be able to predict how fast an output gear wheel is going to be turning from a particular input gear speed.
Each time one tooth of a gear wheel moves it passes on the same movement to the interlocking gear. You would therefore expect two gear wheels each with 100 teeth to rotate at exactly the same speed.....wouldn’t you. If one wheel had twice the number of teeth that the input gear had then you might expect
it to take longer to turn round - and if it had fewer teeth ... ?
Each time one tooth of a gear wheel moves it passes on the same movement to the interlocking gear. You would therefore expect two gear wheels each with 100 teeth to rotate at exactly the same speed.....wouldn’t you. If one wheel had twice the number of teeth that the input gear had then you might expect
it to take longer to turn round -

This is called the VELOCITY RATIO. It is the relationship of how fast the input gear goes round compared to the output wheel. Ask for help if you are not sure how to work this out. First find the Gear Ratio (GR) … Then simply think of the ’speed’ at which this will make things turn round...


Why donate ?